
资料下载


×
卡尔曼滤波器及其工程应用的详细资料说明
消耗积分:1 |
格式:pdf |
大小:0.17 MB |
2019-07-24
徐超
分享资料个
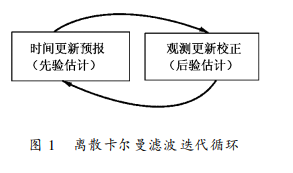
卡尔曼于 1960 年提出了离散系统线性滤波的递推求解方法即卡尔曼滤波算法。 该滤波算法是基于线性最小平方法的、进行有效递推计算的一组数学方程式, 算法功能强大, 支持对过去、现在和将来状态的估算。 本文旨在对离散系统的卡尔曼滤波作应用方面的介绍:包括对基本离散卡尔曼滤波器的描述与讨论;对扩展型卡尔曼滤波的讨论;应用实例进行分析和仿真;讨论卡尔曼滤波在汽车定位与导航工程上的应用。
1960 年 , 卡尔曼发表了关于描述离散系统线性滤波问题的递推算法的著名论文。自那时起,由于数字计算技术的巨大进步, 卡尔曼滤波方法得到了深入的研究和广泛的工程应用 ,特别是在自主或辅助定位导航领域 ,在测量和信号处理及自动控制领域 。国内较早详细介绍卡尔曼滤波理论的书籍是敬喜1973 年的《卡尔曼滤波器及其应用基础》 。此外, Gelb , Grewa , Lew is, Jacobs 等也分别对卡尔曼滤波作出了进一步深入的研究,至今,各类改进型卡尔曼滤波方法,如 :内模自适应卡尔曼滤波、带随机遗忘因子的自适应卡尔曼滤波、与各类传感器信息融合相结合的卡尔曼滤波方法都是控制理论的研究热点 。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章






