
资料下载


使用模拟操纵杆控制Arduino 4WD智能汽车
分享资料个
描述
描述
大家好!这是我的下一个项目 - 带有操纵杆控制器的 Arduino 4WD RC 汽车或使用模拟操纵杆控制 Arduino 4WD 智能汽车是多么容易。
这款 RC 操纵杆控制的汽车使用 NRF24l01 作为发射器和接收器。它在开放空间的射程可达 1 公里。也非常简单,易于制作。
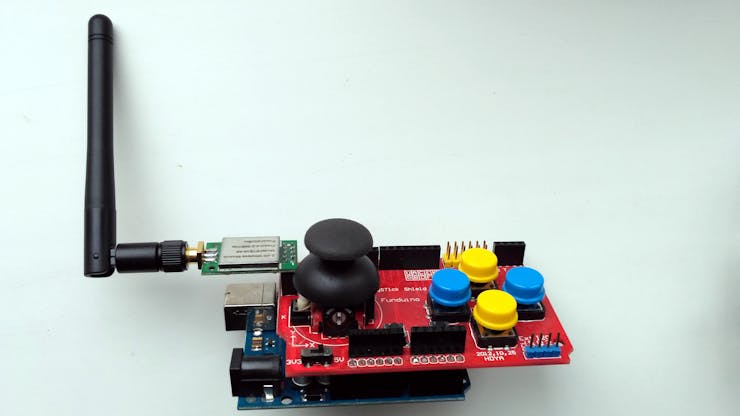
1.操纵杆控制器
操纵杆组件:
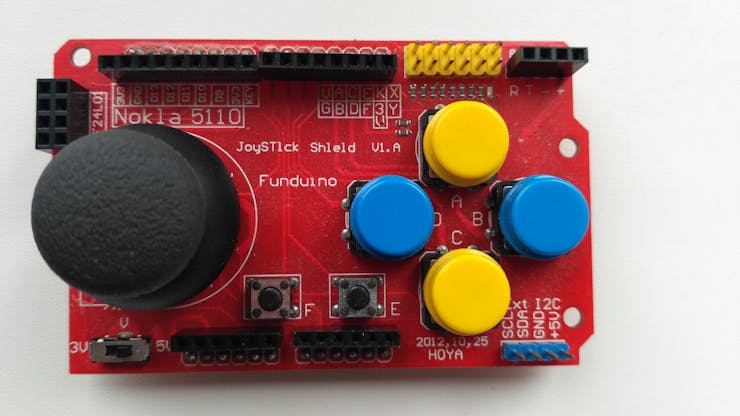
操纵杆盾位于您的 Arduino 顶部,并将其变成一个简单的控制器。7 个瞬时按钮(4 个大按钮、2 个小按钮和一个操纵杆选择按钮)和一个两轴拇指操纵杆使您的 Arduino 功能达到旧任天堂控制器的水平。本机还提供诺基亚 5110 LCD 和 nRF24L01 接口。
特征:
- nRF24L01接口
- 诺基亚 5110 液晶界面
- 蓝牙接口
- I2C 接口
- 与 Arduino 兼容
- 工作电压3.5V或5V

实际上,它被标记为BTE16-49 - nRF24L01+RFX2401C +PA+LNA无线通信模块,带天线屏蔽壳2.4GHz 20dbm 1000m。
卖方指定的特征:
- 2.4GHz 全球开放 ISM 频段,免许可使用
- 最高运行速度2Mbps,高效GFSK调制,传输音频、视频
- 125个通道,满足多点通信和跳频通信需求
- 内置硬件CRC错误检测和点对多点通信控制的地址
- 工作电压3.0-3.6V,发射功率20dBm(VDD=3.3V)
- 外置 2.4GHz 天线
- 2.54mm间距管脚,完全兼容无需功放模块接口,方便更换提升距离
- 传输距离可达 1000 m

2.操纵杆控制器
Joystick Shield 有 4 个大按钮 + 2 个小按钮 + 操纵杆选择按钮和一个两轴拇指操纵杆(X 轴从 0 到 1023,Y 轴从 0 到 1023)一个简单的控制器。在我的草图中,按钮向上用于蜂鸣器(喇叭),右按钮 - 前灯(LED + 电阻 200 欧姆),左按钮 - 后灯(LED + 电阻 200 欧姆)。不使用其他按钮。
操纵杆测试:
_Ykd3uAp4Tr.png?auto=compress%2Cformat&w=740&h=555&fit=max)
空闲状态:X=499, Y=502, Up=1, Right=1, Down=1, Left=1
_UdVHcxyWcI.png?auto=compress%2Cformat&w=740&h=555&fit=max)
_NZSuedHMIh.png?auto=compress%2Cformat&w=740&h=555&fit=max)
3. Arduino 4WD 遥控车
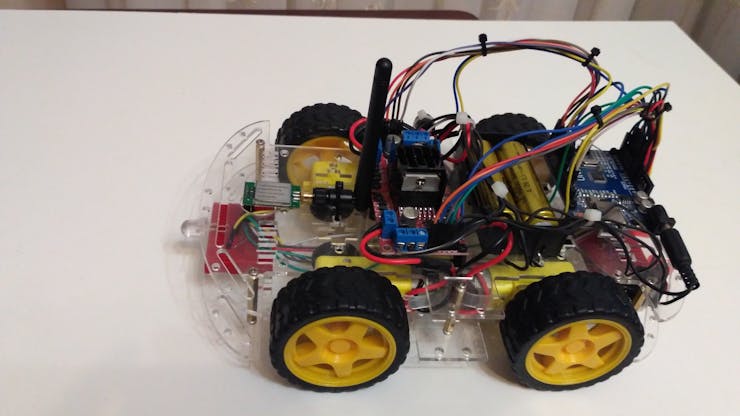
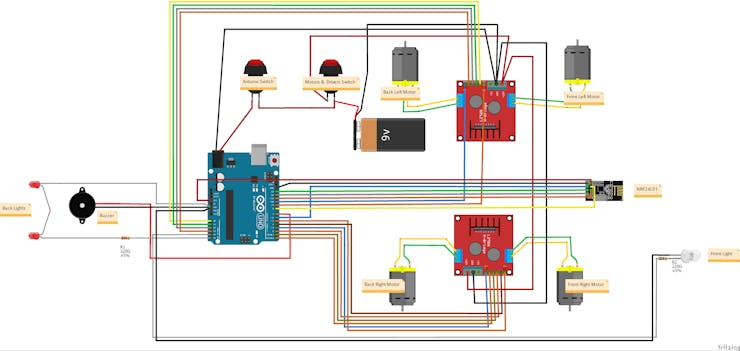
按照上面的接线图进行连接。
注意:在上传代码之前,您必须从 Arduino Uno 板(引脚 0、1)断开跳线。
一旦您正确完成所有步骤,汽车就可以出发了!
为 Arduino Car 和 Joystick 控制器供电后,您可以使用 Joystick 通过前后移动操纵杆来控制汽车,汽车将向前或向后移动,左右移动操纵杆将使汽车左右转向。
敬请关注!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





