
资料下载


×
自动驾驶决策概况
消耗积分:0 |
格式:pdf |
大小:1.29 MB |
2023-06-01
郝埃连
分享资料个
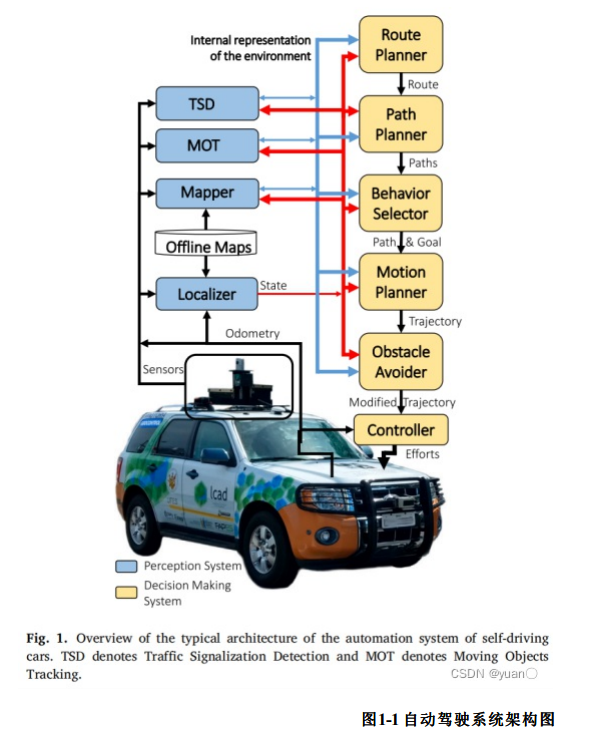
Claudine Badue [1]等人以圣西班牙联邦大学(UFES)开发的自动驾驶汽车(Intelligent Autonomous Robotics Automobile,IARA)为例,提出了自动驾驶汽车的自动驾驶系统的典型架构。如图所示,自动驾驶系统主要由感知系统 (Perception System)和规划决策系统(DecisionMaking System)组成。感知系统主要由交通信号检测模块(Traffic Signalization Detector,TSD)、移动目标跟踪模块(MovingObjects Tracker,MOT)、定位与建图模块(Localizerand Mapper)等组成。规 划决策系统主要由全局路径规划模块(Route Planner)、局部路径规划模块(Path Planner)、行为决策模块(Behavior Selector)、运动规划模块(Motion Planner)、自主避障模块(Obstacle Avoider)以及控制模块(Controller)组成。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




