
资料下载


×
基于ARM的移动机器人组合导航系统设计与实现
消耗积分:0 |
格式:rar |
大小:0.65 MB |
2017-09-25
分享资料个
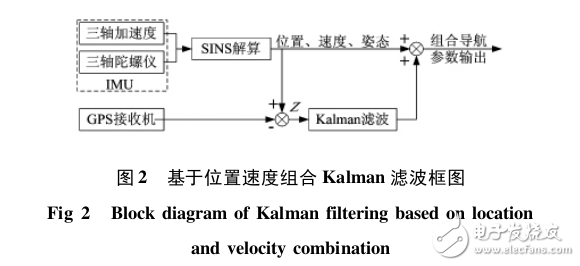
对自主性、可靠性、精度等要求较高的室外自主移动机
器人运用场合,常使用多传感器组合导航系统。惯性导航
系统( INS) 是一种能够提供全面的导航信息,完全自主的
导航系统,但其误差随时间不断累计。全球卫星定位系统
( GPS) 定位范围广、精度高,误差不随时间累计,其不足之
处在于自主性和可靠性差,信号易受外界遮挡和干扰,接收
机数据更新率低。INS /GPS 组合导航系统利用 INS 和 GPS
互补的特点,继承了 2 个独立系统的优点,被认为是导航领
域最理想的组合方式,成为当前研究热点。随着组合水平
的提高,INS 与 GPS 之间相互辅助,传递使用信息的加强,
组合系统的总体性能远远高于独立系统[1,2]

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





