
资料下载


高速直流驱动定位表的扰动观测器和前馈设计
maomao55555
分享资料个
ACCURATE tracking at high speeds is required in many positioning systems, particularly in manufacturing applications. Research on discrete-time tracking controllers includes [3], [10]–[12], [14] which all combine feedback and feedforward controllers. The feedback controllers each include some form of disturbance compensation such as integral action, an extended state estimator, or a disturbance observer. In [11] a zero phase error tracking controller (ZPETC) based on approximate inversion of the closed-loop system is introduced for the feedforward compensator and this technique is used in [3], [9], [10], [12], and [14]。 Advances have not been limited to control theory. Development and commercialization of improved electromechanical components has progressed rapidly. Particularly noteworthy from a system design viewpoint are direct-drive motors. In Manuscript received July 7, 1997; revised June 22, 1998. Recommended by Associate Editor, R. Takahashi. This work was supported in part by NSF/CGP under Grant INT-9503951. C. J. Kempf is with Kensington Laboratories, Inc., Richmond, CA 94804 USA. S. Kobayashi is with NSK Ltd., Precision Machinery and Parts Technology Center, Maebashi, Gunma, Japan. Publisher Item Identifier S 1063-6536(99)06446-5.
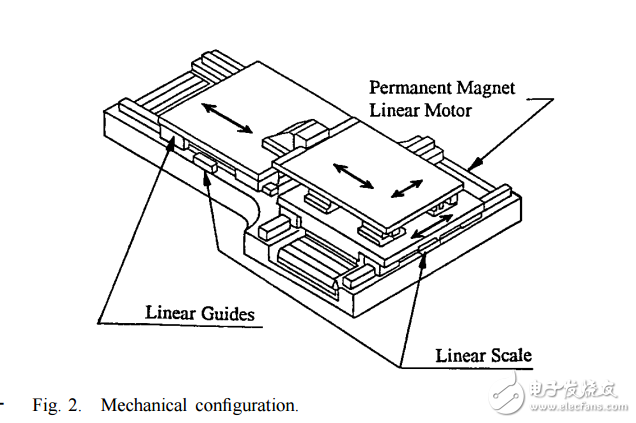
comparison to traditional gear-reduced systems, the technical advantages of direct-drive systems are widely known among control engineers: friction is reduced, backlash is eliminated, and the mechanical stiffness is very high. The disadvantages, on the other hand, usually do not get as much attention: electrical dynamics tend to be slow and the system is more sensitive to disturbance forces and inertia variations. To fully exploit the potential advantages of direct-drive actuators, all of these factors should be explicitly accounted for in the controller design.
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章



