
资料下载


×
基于并联机器人非线性方程求解
消耗积分:1 |
格式:rar |
大小:0.74 MB |
2017-12-01
分享资料个
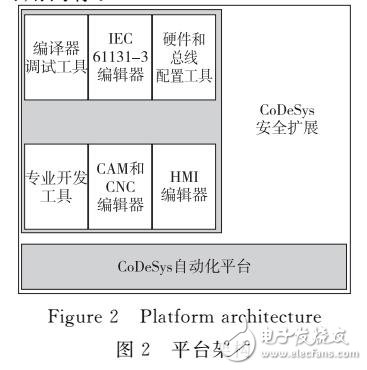
机器人技术发展到现在,虽然已经得到了突飞猛进的进步,但是对于并联机器人运动学正解的封闭解问题依然是机器人技术的瓶颈,在实际应用中采用的广义几何法和方程组的数值解法等,不但推导过程非常复杂,而且在求解的过程中还存在解不唯一的问题。为了避免上述问题,根据多元函数的Taylor公式推导出了一种基于三元非线性方程组牛顿迭代法的并联机器人运动学正解算法;同时,基于其数学原理,也可以得到并联机器人的反解。Taylor法以其自身的优势,巧妙地解决繁琐的并联机器人运动学正解多解取舍问题,直接获得了工作空间内满足运动连续性的合理解。该算法的迭代次数少,收敛速度快,是一种非常有潜力的方法。最后将该算法应用到CoDeSys开发环境,通过配置方式,证明CodesVs环境下并联机器人运动学可实时灵活应用。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




