
资料下载


×
基于建筑特征及二维地图的移动机器人视觉定位
消耗积分:2 |
格式:rar |
大小:0.80 MB |
2018-01-30
分享资料个
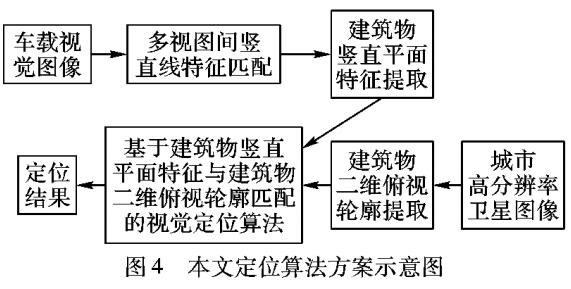
针对城市环境中全球定位系统( GPS)信号易受到高层建筑遮挡而无法提供准确位置信息的问题,提出了一种基于建筑物竖直侧平面特征及建筑物二维轮廓地图的移动机器人定位方法。该方法利用车载视觉,首先对两视图间的竖直直线特征进行匹配;然后基于匹配的竖直线特征对建筑物的竖直侧平面进行重建;最后,利用建筑物竖直侧平面特征及建筑物二维俯视轮廓地图,设计了一种基于随机采样一致性( RANSAC)的移动机器人视觉定位算法,从而解决了在建筑物方向任意的复杂城市环境中的机器人定位问题。实验结果表明,算法的平均定位误差约为3.6 m,可以有效地提高移动机器人在复杂城市环境中自主定位的精度及鲁棒性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





