
资料下载


基于STM32和增量PID的旋转倒立摆的设计
蝎子_94a
分享资料个
倒立摆控制系统是一个多变量、高阶次、强耦合非线性的自然不稳定系统,是检验各种控制理论的 理 想 模 型,一直是控制理论界关注的焦点[1]。倒立摆控制系统能较好地体现出系统稳定性、可控性和抗干扰能力,因此它的控制方法在工业控制、军工、航天、机器人等领域都获得了广泛应用。如何利用较低成本和较低功耗实现稳定可靠的倒立摆,成为当前的一大挑战。
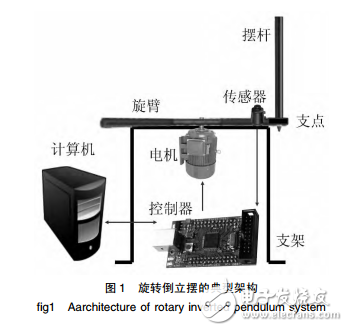
1 倒立摆的研究摆是一种悬挂于定点、在重力作用下往复运动的机械装置。摆可以分为两大类,顺摆和倒立摆。顺摆的支点在上方,重心在下方,例如钟摆、吊车、杂技中的顶伞、旋转的芭蕾舞演员等都属于顺摆的情况。倒立摆与顺摆相反,支点在下方,重心在上方[2]。倒立摆系统是一种恒不稳定的非线性系统,控制比较复杂,应用非常广泛,例如火箭在空中的姿态调整、卫星在太空中的飞行姿态控制、智能平衡小车,以及机器人等各类复杂的控制系统,往往都是利用倒立摆的控制方法来实现[3]。可以说,倒立摆已经成为测试控制理论是否有效的试金石,也是产生新的控制方法的基础平台。倒立摆可以从级数、架构两方面进行划分。首先,从支点和摆的数量来看,可以划分为一级、二级、三级等倒立摆[4]。其次,从架构来看,可以划分为直线、环形和平面等类型。环形倒立摆也称为旋转型倒立摆,其摆体组件安装在可以自由运动的圆周运动模块上,控制难度更大。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





