
资料下载


移动机器人AS-R系统结构分析和目标检测与目标跟踪技术的研究
分享资料个
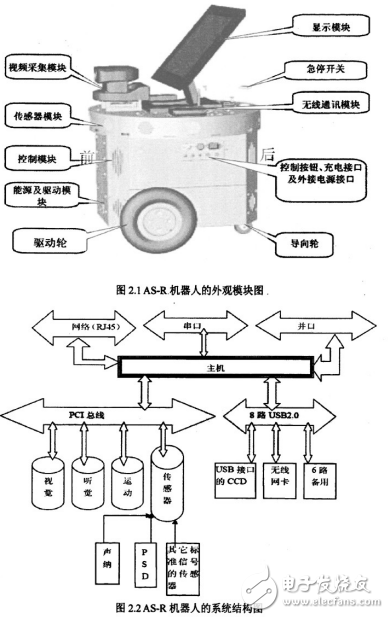
在机器人学的研究中,机器人系统的体系结构一直是人们关注的热点。通用开放式机器人系统是今后发展的潮流。根据IEEE对“开放”的官方定义,开放系统应满足系统的应用能在不同的平台之间移植,能与其他应用系统交互,为用户提供一致的交互方式。根据IEEE对开放性的理解。开放式机器人应该具有以下特征: (1)使用基于非专用计算机平台的开发系统; (2)使用标准的操作系统和标准的控制语言; (3)硬件基于标准总线结构,能够与各种外围设备和传感器接口; (4)能与分布式系统中其他单元共享数据,并允许远程操作; (5)机器人系统的性能和功能可以根据实用需求很方便地增减。 AS.R机器人完全符合上述条件,是开放式机器人。AS.R机器人采用工业PC架构,集成Windows操作系统和VC 6.0开发环境。它的外观模块结构和系统结构分别如图2.1和图2.2所示。 2.1 AS.R主要特点 (1)模块化设计能力风暴研究版机器人采用模块化设计。用户可以根据自己的需要采用不同的模块来实现自己制定的任务。 (2)开放性的研究平台能力风暴研究版机器人的最大特点就是其开放性。能力风暴研究版机器入的操作系统是通用的Windows 2000/XP,开发工具是VC。能力风暴研究版机器人的控制系统是开放的,用户可以对控制系统的底层进行操作。 (3)良好的可扩展性能力风暴研究版机器人有5个PCI槽可供用户扩展其它板卡,同时也外接了8个USB2.0接口供用户使用。机器人上已经配备了AD采集卡、声纳测距卡可供用户扩展使用。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




