
资料下载


电机控制系统——伯德图和稳定性
分享资料个
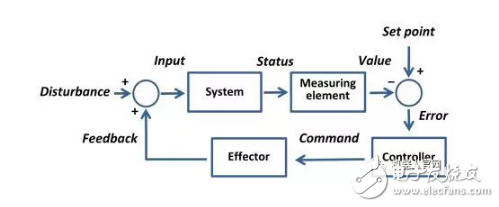
什么是控制系统?控制系统是能把事物的未来状态变得更理想的一种系统。我们经常使用的反馈控制系统(也称为闭环控制)是把控制结果反馈到控制系统的一种方式。由于存在反馈环节,闭环控制能使系统的精确度得到提升。相反地,如果不将控制的结果反馈回来与希望值对比,则称为开环系统。
我最近在机器人论坛上收到一个关于调谐电机和理解伯德图的问题。据我所知,目前许多电机控制软件包都带有可以直接生成伯德图的调整工具,所以我特意撰写这篇文章来解答那位朋友的问题。
通过上图可以看到,我们很难仅仅通过观察电机运动来得知系统的频率。你需要找出所需转换的时域信号,并用傅立叶变换把它导入相应的频域信号,这之后你才能得到这阶段系统的频率。一旦将时域转换为频域,我们就可以使用伯德图。伯德图能帮我们看出在不同频率下,系统增益的大小及相位,也可以看出增益大小及相位随频率变化的趋势,还可以对系统稳定性进行判断。
注意:假如你知道传递函数,在开环系统中,您只需使用根查找(即找到使等式等于0的值)来检查系统的稳定性(确保所有根为负实值)。而对于基于信息反馈的闭环系统来说,修改公式内容并用计算机求解(计算难度较大)或使用伯德图能帮你更易于掌握系统状态。(使用Routh-Hurwitz可以规避计算机求解过程中的复杂运算,但由于篇幅限制,本文对此不多加介绍。)
一般来说,伯德图能显示出系统增益的大小(趋势)及相位。
伯德图的组成
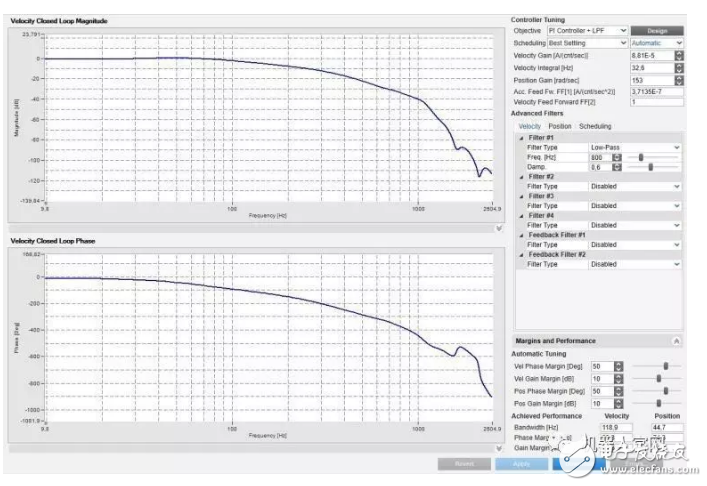
增益是输入信号和合成命令之间的值的偏移。如果你的系统没有任何增益和减损,那么你将得到一条增益为0dB的水平直线。你通常可以在图的右侧看到增益下降(减少)趋势。
幅值曲线下降幅度越大,系统的稳定性越高,主曲线中的凸起和波动通常是系统不稳定的象征。如果增益增加到无穷大(即大值),这通常是系统不稳定的征兆,你需要重新查验一下你的控制器设置。如果你得到了增益的峰值,请参阅下面的过滤部分。
提醒:从原始时域信号处获取dB。
带宽是从幅值曲线顶部到曲线降低至-3dB的区域。在上图中你可以看到幅值曲线停留在100Hz附近,所以该系统的带宽大约在100Hz左右。图中的绘图工具实际上在图像右下角的方框中显示了118.9Hz的精确带宽值。
相位描述了输入信号和输出指令之间的时间偏移。伯德图的相位以360为一个周期。所以如果你有一个1KHz(即1000Hz)的命令信号,每个360°的图将代表1/1000秒,也就是1毫秒。通过观察相图你可以发现,一旦超过带宽,输入信号转换为输出信号的耗时就会增加。
过滤特定频率
在工作过程中,工程师们常会使用各种滤波器(低通,凹口等)来去除特定频率的谐振。比如说,如果你旋转一个电机,发现某一种特定的频率开始猛烈波动,这时你添加了一个滤波器,增益就会帮你降低在那个频率。一般来说,电机只在需要时才添加过滤器。
验证控制参数
输入命令(时域)后,你可以通过查看输出波形来判断所选增益是否良好,这通常被称为示波器模式。如果曲线在运动一开始就出现初始振铃(波动)或超调,你的增益将会升高。如果初始命令转变为输出信号耗时过久,那你就可能需要提高增益。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






