
资料下载


×
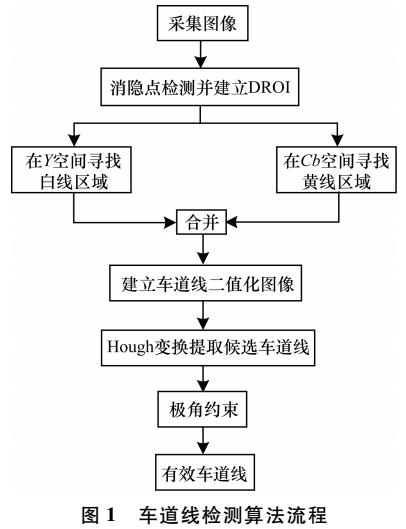
动态感兴趣区域的光照无关车道线检测算法
消耗积分:1 |
格式:rar |
大小:4.99 MB |
2018-02-24
分享资料个
随着机动车的普及,交通事故数量不断增长,而许多事故的产生是由于驾驶员对道路状况的疏忽或受到其他视觉干扰,因此,先进的驾驶员辅助系统( Advanced Driver Assistance System, ADAS)作为智慧交通的重要组成部分应运而生。 ADAS作为自动驾驶技术的核心,应用了大量传感器,如摄像头、激光、雷达、全球定位系统等。其中基于摄像头的辅助系统以成本低和信息采集全面的优点而被广泛应用于自动驾驶领域,其由车道线检测、偏离预警等基本模块组成,能够在车道偏离、车前有障碍物等异常情况下及时提醒驾驶员,从而保证驾驶安全。车道线检测作为自动驾驶的关键环节成为目前的研究热点,传统的车道线检测方法有逆视投影变换法、粒子滤波法、霍夫变换法等,但这些方法都表现出计算量大、处理速度慢的缺点H1,且很多算法只能基于白天良好光照条件实现,而在夜晚、隧道等复杂光照环境中会完全失效。
本文以自动驾驶的安全和高效为准则,将提高处理速度和增强对光照的适应能力为目标,提出一种实时的光照无关车道线检测算法,并建立大量样本以测试车道线检测算法的性能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章



下载排行榜
- 暂无相关数据

