
资料下载


×
无线移动机器人及运动监测系统的设计详析
消耗积分:0 |
格式:rar |
大小:0.49 MB |
2018-04-28
分享资料个
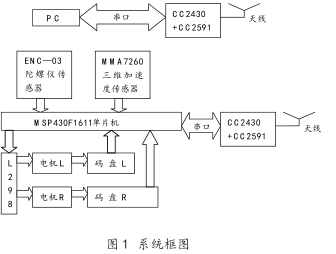
介绍了一种无线两轮驱动机器人小车和软硬件实现方法,计算机通过串口无线控制机器人小车和接收机器小车反馈回来的运动状态信息。在对几种近距无线通信协议进行分析和比较的基础上,选用Zigbee协议栈技术作为基本的通信协议,并基于该协议实现遥控机器人小车和监测小车的运动状态,通过监测机器人的运动状态来提高控制的准确度。CC2430无线单片机负责无线通信和组网,MSP430单片机作为主控制芯片,MSP430通过产生两路PWM波来控制两路直流电机,实现机器人根据计算机发出的各种命令执行不同的动作。该机器人已用于危险环境监测研究当中。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




