
资料下载


并联机器人机构特点及其设计与分析
分享资料个
并联机器人相对于目前广泛应用的串联机器人来讲,具有刚度强、精度高、自重负荷比小、速度高等显著的优点;但也有其不足之处,如同样的结构尺寸,并联机器人的工作空间小,存在杆件空间的干涉、奇异位置等问题,结构设计理论分析复杂。由于并联机构动力学特性具有高度非线性、强耦合的特点,使其控制较为复杂。总体来讲,并联机器人与串联机器人构成互补的关系,扩大了整个机器人的应用领域。并联机器人机构多种多样,Clavel 提出了一种称为Delta 的三维移动机构。Delta机构是最典型的空间三自由度移动的并联机构,大多数空间三自由度并联机构都是从Delta 机构衍生的。Delta 机器人是一种具有3个平动自由度的高速并联机器人,也是商业应用最成功的井联机器人之一。目前,并联机器人广泛应用于飞行器对接、外科手术和数控加工等众多领域。食品制药领域普遍采用流水线生产,个别产品包装环节还离不开人工操作,由于环境复杂、产品特殊,传统机构很难满足灵活高效的要求,而并联机构在这些场合能充分发挥其优势。本文主要针对包装堆垛机器人的机构设计进行探讨和分析。
机构介绍
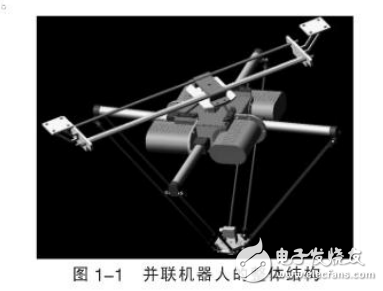
根据包装堆垛机器人的动作要求可知delta型机器人即可满足要求。由于结构中有空间平行四边形存在,限制了机构的三个转动自由度,仅仅留下三个平动自由度。于是设计了如下的并联机器人,如图1-1所示
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




