
资料下载


×
一种改进扩展卡尔曼的四旋翼姿态估计算法
消耗积分:2 |
格式:rar |
大小:1.07 MB |
2017-12-04
分享资料个
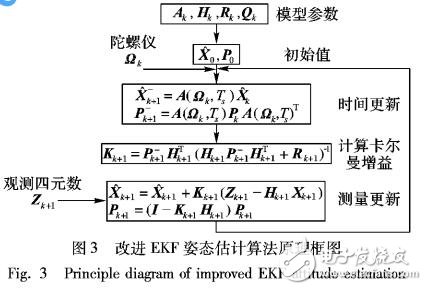
为了提高标准扩展卡尔曼姿态估计算法的精确度和快速性,将运动加速度抑制的动态步长梯度下降算法融入扩展卡尔曼中,提出一种改进扩展卡尔曼的四旋翼姿态估计算法。该算法在卡尔曼测量更新中采用梯度下降法进行非线性观测,消除标准扩展卡尔曼算法在线性化时带来的线性化误差,提高算法的准确性和快速性;对梯度下降法的梯度步长进行动态处理,使算法步长与四旋翼飞行器的运动合角速度成正比,增强微型四旋翼飞行器姿态解算的动态性能;对强机动运动过程中机体产生的运动加速度进行抑制处理,消除运动加速度对姿态解算的不利影响,提高了微型四旋翼飞行器姿态解算的跟踪精度。为了验证所设计算法的可行性和有效性,基于STM32单片机搭建四旋翼实验平台系统进行实时在线性能验证。结果表明,所设计算法能提高四旋翼飞行器在强机动、高速运动情况下的姿态跟踪精度、动态性能,增强姿态融合算法的抗干扰性,保证微型四旋翼飞行器的稳定飞行。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章





下载排行榜
- 暂无相关数据

