
资料下载


KUKA 机器人SPS.SUB程序解析
似水流年1974
分享资料个
KUKA机器人SPS.SUB程序解析
&ACCESS RVO
&COMMENT PLC on control
DEF SPS ( )
;FOLD DECLARATIONS
;FOLD BASISTECH DECL
;Automatik extern
DECL STATE_T STAT
定义STATE_T类型的变量。该结构为:
STRUC STATE_T
CMD_STAT RET1, CMD_STAT是枚举类型数据,组成了STATE_T结构的第一个数据RET1
INT HITS ,
INT LENGTH
其中CMD_STAT是枚举类型的数据:
ENUM CMD_STAT CMD_OK, CMD_TIMEOUT, DATA_OK, DATA_BLK, DATA_END, CMD_ABORT, CMD_REJ, CMD_PART, CMD_SYN, FMT_ERR
与CWRITE有关的返回值如下表:
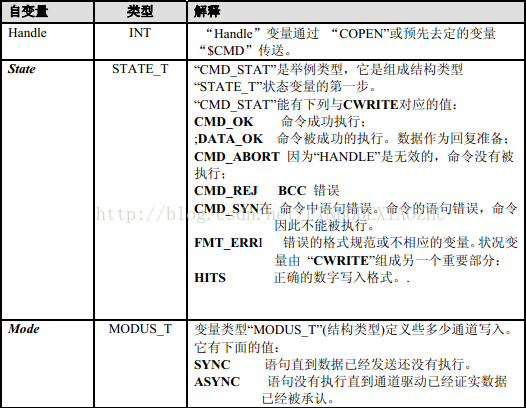
变量类型 MODUS_T(结构类型)定义多少通道写入,有下列值 SYNC语句直到数据发送还没有执行 ASYNC语句没有执行直到通道驱动已经证实数据已经被承认。
DECL MODUS_T MODE
;ENDFOLD (BASISTECH DECL)
;FOLD USER DECL
;Please insert user defined declarations
;ENDFOLD (USER DECL)
;ENDFOLD (DECLARATIONS)
;FOLD INI
;FOLD DEFAULT MSG_T
信息显示的结构:
$MSG_T={MSG_T: VALID FALSE,RELEASE FALSE,TYP #NOTIFY,MODUL[] " ",KEY[] " ",PARAM_TYP #VALUE,PARAM[] " ",DLG_FORMAT[] " ",ANSWER 0}
;ENDFOLD (DEFAULT MSG_T)
;FOLD AUTOEXT INIT
中断函数声明,当系统变量$PRO_STATE1(机器人解释程序的进程状态为P_FREE(不选择程序)调用RESET_OUT ()):
INTERRUPT DECL 91 WHEN $PRO_STATE1==#P_FREE DO RESET_OUT ()
INTERRUPT ON 91
$LOOP_MSG[]="
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章





下载排行榜
- 暂无相关数据

